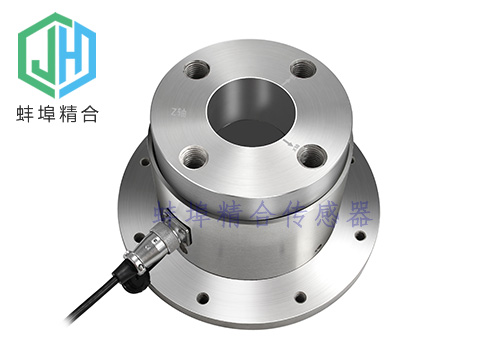


JH-WF401四维力传感器
JH-WF401四维力传感器 四维力传感器,能同时检测三维空间的三个力值(Fx、Fy、Fz)及扭矩力值(Mz),通过它控制系统不但能检测和控制机器人手抓取物体的握力,而且还可以检测抓取物体的重
联系我们
热线电话 13395520278
产品详情
| JH-WF401四维力传感器 |
|
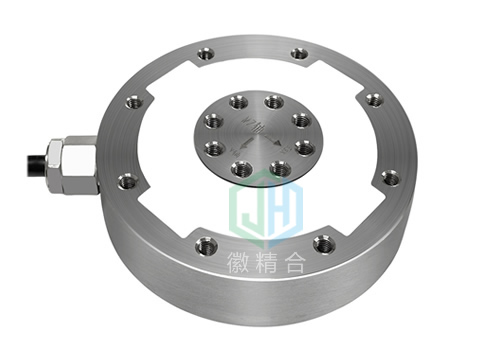
| 四维力传感器,能同时检测三维空间的三个力值(Fx、Fy、Fz)及扭矩力值(Mz),通过它控制系统不但能检测和控制机器人手抓取物体的握力,而且还可以检测抓取物体的重量,以及在抓取操作过程中扭力、振动等力值检测。 |
| 具有灵敏度高、钢性好、维间耦合小等特点;广泛应用于精密装配、自动磨削、轮廓跟踪、机器人抛光等领域;在航空、航天及机械加工、汽车等行业中亦有广泛的应用。 |
| 技术参数 |
| 量程 | X/Y轴:0~10kg |
| Z轴:0~20kg | |
| Mz轴:2N.m~10N.m | |
| 零点输出 | ≤±1%F.S |
| 灵敏度 | 0.7~1.5mV/V |
| 非线性 | ≤±0.3%F.S |
| 滞后 | ≤±0.2%F.S |
| 重复性 | ≤±0.3%F.S |
| 蠕变 | ≤±0.3%F.S/30min |
| 相互干扰 | ≤±2.5%F.S |
| 零点温度漂移 | ≤±0.03%F.S/10℃ |
| 灵敏度温度漂移 | ≤±0.03%F.S/10℃ |
| 使用温度范围 | -20℃~+60℃ |
| 输入阻抗 | 380±30Ω/730±30Ω |
| 输出阻抗 | 350±3Ω/700±3Ω |
| 绝缘电阻 | ≥5000MΩ/100VDC |
| 安全过载 | 120%F.S |
| 供桥电压 | 5~12VDC(推荐10VDC) |
| 材质 | 铝合金 |
|
量程、尺寸、安装位置等可按客户要求非标定制。 |